






Products and Draft Patents
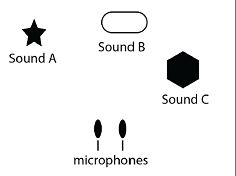
AuditoryAI
The invention is an new process to register the existinance of sound objects,localize them, prioritize them, and direct the behaviour of an agent (e.g. a robot) towards them.
gazeTracking
The product endows intelligent system with one camera to infer the gaze direction by looking at the head orientation and the iris position.
-----------------------
------------------------
-------------------------
Testimonials

-------------------------------------------------
Prof. Samia Nefti Meziani/Robotics and Automation, Salford University
--------------------------------------------------
Prof. Davide Brugali/ Robotics, Universita degli Studi di Bergamo





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}